



Smart Solutions
Where Engineering Meets Human Experience.
Newcomb & Boyd’s Building Experience Studio brings acoustics, lighting, and audiovisual design together as one discipline, coordinated from the first conversations through commissioning. See how integrated design shapes what people feel in a space, illustrated through projects for Insight Global and AbbVie.


Integrated Engineering: Built to Perform. Designed to Last.
We have been engineering buildings for over a century at Newcomb & Boyd. Learn who we are.
A New Structure: Market-focused Design. One Integrated Approach. Built Around You.
For more than a century, Newcomb & Boyd has designed buildings as complete systems, not as a collection of isolated disciplines. Our new studio structure reflects exactly that


Transforming A Campus Wellness Center into a Digital Destination through Integrated AV Design
Samford University’s Seibert Wellness Center has reopened as one of the most dynamic and technologically advanced facilities on campus, where wellness, competition, and connection come together. Our team helped Samford create a future-ready environment that integrates wellness, academics, and digital innovation.
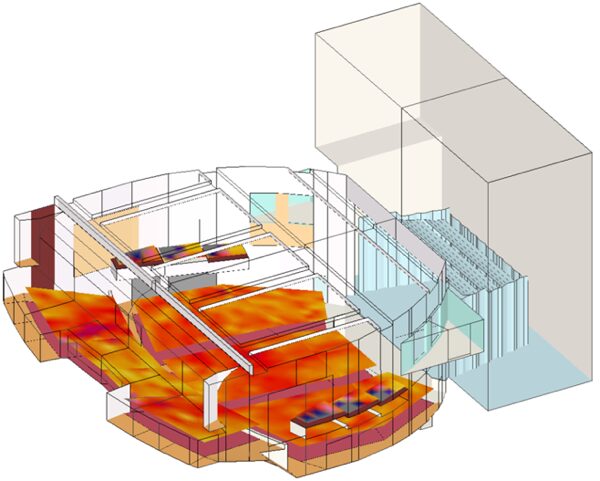
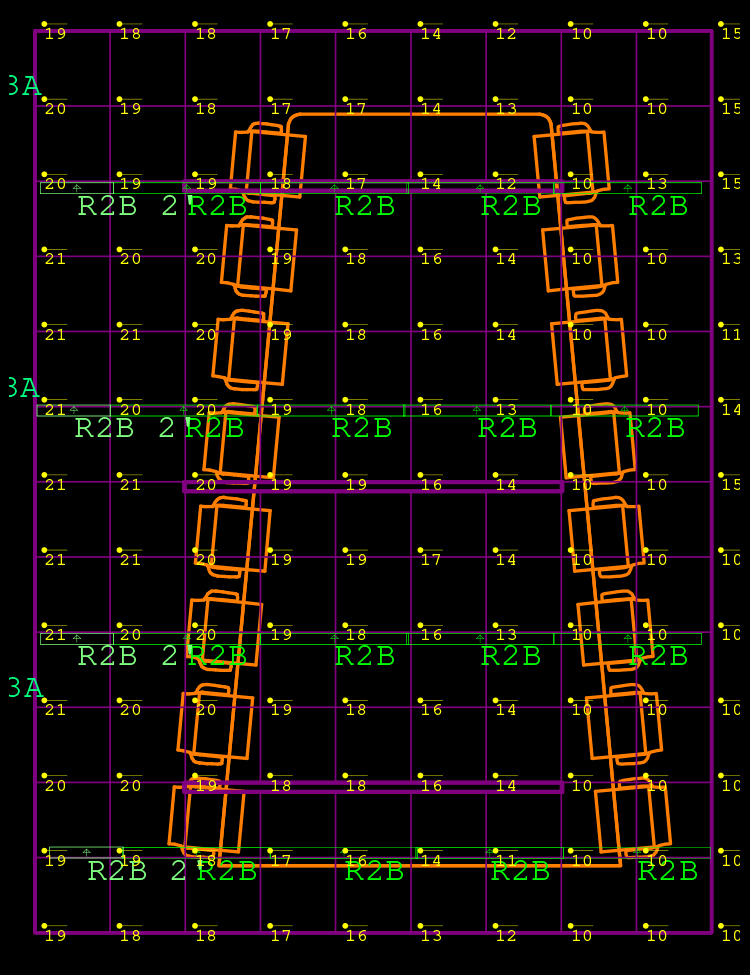
Using CFD to Redefine Comfort in Historic Auditoriums
By simulating real-world conditions, we turned complex HVAC choices into confident design decisions.

Building Smarter Futures: How Our Team is Influencing LEED v5
At Newcomb & Boyd, our Sustainability Studio staff are recognized experts who not only help clients achieve their goals every day, but also advance sustainability across the industry.
Leveraging Data to Drive Sustainability
Is your data hindering your sustainability goals?


The Rosetta Stone of Intelligent Buildings
Does your organization struggle with internal projects because teams aren’t on the same page?
Let's Walk the Talk: Newcomb & Boyd's Sustainability Journey
Newcomb & Boyd’s newly renovated Atlanta Office provides a space that is comfortable, healthy, and sustainable for employees and visitors. Following the company mission and values, the new office incorporates design features focused on sustainability and wellness for employees.


Taking Junction Krog District to LEED Gold
Junction Krog District initially set out to achieve LEED v4 Core and Shell certification at the Certified Level. Through our innovative pilot approaches in energy and water analyses, we gained additional points, surpassing standard documentation pathways. Without incurring any additional costs or requiring extensive design modifications, the collaborative endeavors of our team not only met but exceeded the objective, and the project achieved LEED Gold certification.

Invesco's New Headquarters: A Showcase of Innovative Design and Technology
Invesco, a leading global investment management firm, has recently moved into its stunning new headquarters located in the 26-story Midtown Union development in Atlanta. This impressive space represents not just a new office, but a significant leap in design and technology, made possible by Newcomb & Boyd, which provided essential Audiovisual, Telecom, Security, Acoustics, and Specialty Lighting design services.
Cybersecurity Operational Technology Services
Our cybersecurity services offer a comprehensive approach to safeguarding your operational technologies. We enhance cybersecurity awareness through educational programs and create customized frameworks for risk management and asset security. Here’s how we can support you:

Visual Comfort: The Art and Science of Specialty Lighting Design
Did you know that our Specialty Lighting Designers prioritize your visual comfort?
It’s true! We’re dedicated to creating lighting solutions that not only illuminate your spaces but also ensure you can perform tasks comfortably and without strain.
Let’s take a closer look at how we achieve this.
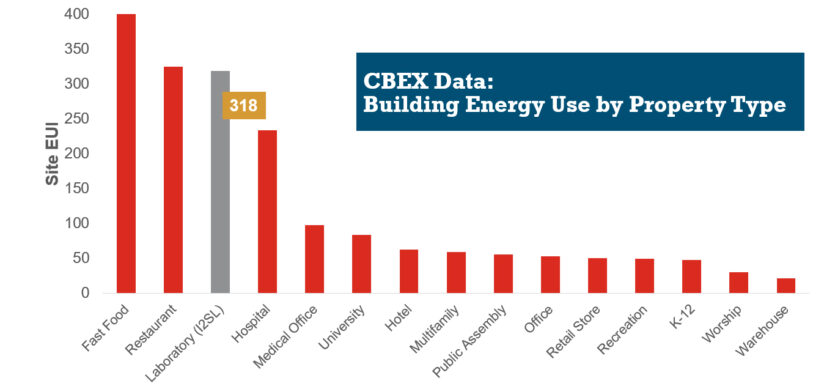
HVAC Design Approaches for Sustainable Laboratories
HVAC systems in a typical laboratory facility can use five to 10 times as much energy as the systems in a typical office building. This higher energy use is due to many factors, including 100 percent outside air systems, 24-hour-a-day operation, high internal heat gains, high air change rate requirements, equipment exhaust requirements, and high fan energy. With this significant energy use, the incentive for creative sustainable design grows—not only to create forward-thinking research spaces, but to maximize a lab’s ROI.